|
Débora Oliveira I'm Doctoral Researcher at the Artificial Intelligence and Robotics Lab in the University of Technology Nuremberg under Prof. Wolfram Burgard. I have a Master's degree in Robotics, Cognition and Intelligence from the Technical University of Munich and a Master's and Bachelor's degree in Electrical Enginnering from the Federal University of Campina Grande. I have a minor in microelectronics and a focus on computer vision and embedded systems.
|

|
Research papers |
|
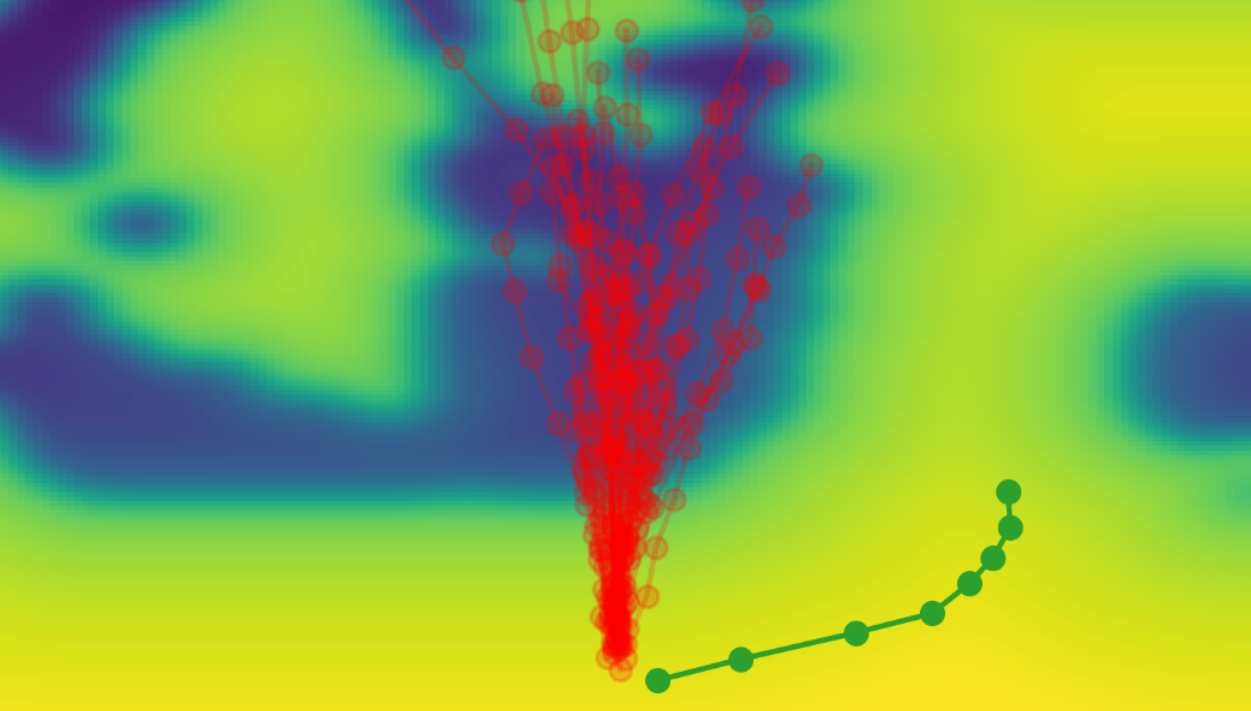
MetricNet: Recovering Metric Scale in Generative Navigation Policies
Abhijeet Nayak*, Débora Oliveira*, Samiran Gode*, Cordelia Schmid, Wolfram Burgard Accepted to International Conference on Robotics & Automation (ICRA), 2026 |

|
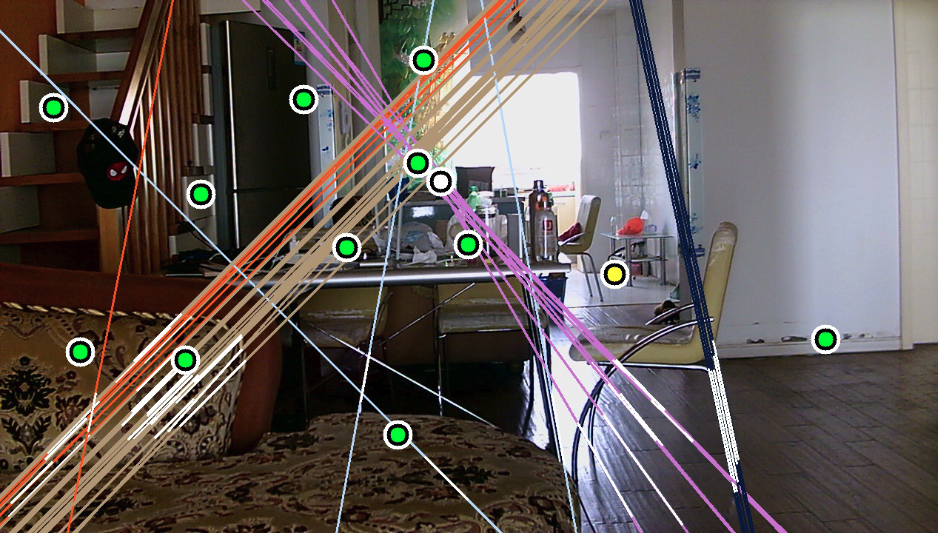
FlowNav: Combining Flow Matching and Depth Priors for Efficient Navigation
Samiran Gode*, Abhijeet Nayak*, Débora Oliveira*, Cordelia Schmid, Wolfram Burgard Accepted to International Conference on Intelligent Robots and Systems (IROS), 2025 |
|
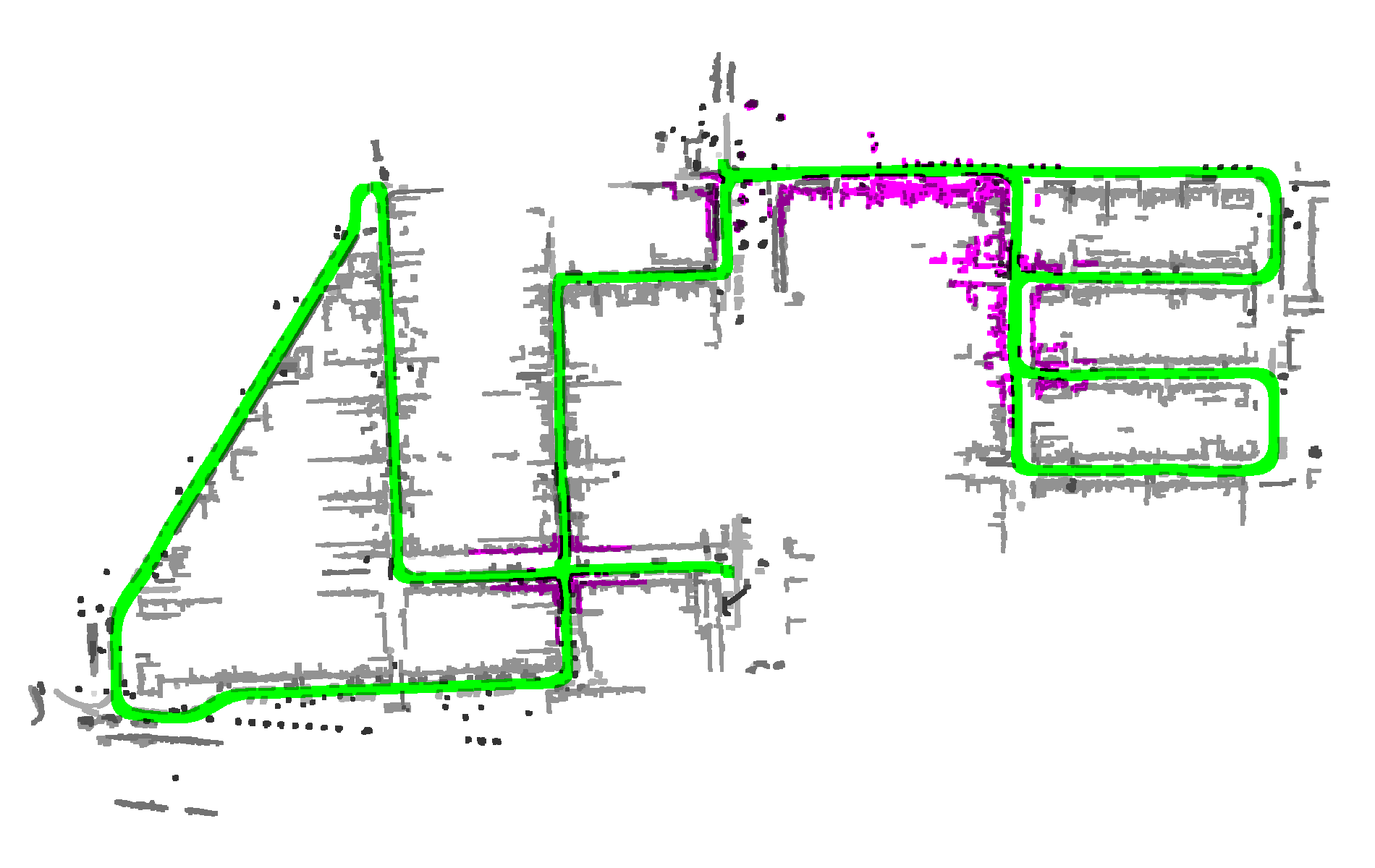
REGRACE: A Robust and Efficient Graph-based Re-localization Algorithm using Consistency Evaluation
Débora Oliveira*, Joshua Knights*, Sebastián Barbas Laina*, Simon Boche*, Wolfram Burgard, Stefan Leutenegger Accepted to International Conference on Intelligent Robots and Systems (IROS), 2025 |

|
Optical tracking system based on COTS components
Débora Oliveira*, Marcos Morais, Antonio Marcus Lima Accepted at to International Conference on Image Processing Applications and Systems (IPAS), 2022 |
|
Void detection for UAV based on optical flow and vanishing points
Débora Oliveira*, Marcos Morais, Antonio Marcus Lima Accepted at to Brazilian Symposium on Intelligent Automation (SBAI), 2021 (Honorable Mention) |
|
Inspired by Jon Barron |